Industrie Mag - Le journal de l'industrie.
- accueil .
- newsletter .
 Flux RSS .
Flux RSS . - soumissions .
- publicité .
- contacts
Flux RSS .
 Les stations de travail robotisées de manipulation de liquides sont essentielles à la recherche génomique, pharmaceutique et vaccinale. Elles ont permis aux techniciens de laboratoire de réaliser les dernières avancées scientifiques. Les moteurs miniatures sélectionnés, en particulier ceux qui fonctionnent sur l’axe Z du mouvement, influencent directement la vitesse à laquelle sont obtenus les résultats. Des spécifications de vitesse adéquates permettent de s’assurer que la prochaine découverte, le prochain traitement ou la prochaine cure seront fournis plus rapidement.
Les stations de travail robotisées de manipulation de liquides sont essentielles à la recherche génomique, pharmaceutique et vaccinale. Elles ont permis aux techniciens de laboratoire de réaliser les dernières avancées scientifiques. Les moteurs miniatures sélectionnés, en particulier ceux qui fonctionnent sur l’axe Z du mouvement, influencent directement la vitesse à laquelle sont obtenus les résultats. Des spécifications de vitesse adéquates permettent de s’assurer que la prochaine découverte, le prochain traitement ou la prochaine cure seront fournis plus rapidement.
Valentin Raschke, ingénieur d’application chez Portescap, explore les besoins des stations robotisées de manipulation de liquides et compare deux designs de moteurs miniatures.
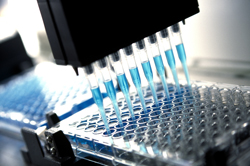 Les stations robotisées pour la manipulation des liquides permettent d’automatiser un grand nombre de tâches répétitives comme le débouchage et le rebouchage des tubes à essai, la distribution précise de liquide, le mélange, l’agitation et le transport des tubes à essai traités. Jusqu’à récemment, ce travail était effectué manuellement par des techniciens formés à l’aide de pipettes électroniques. La vitesse, la précision et l’exactitude de ce processus dépendaient entièrement des compétences et de l’expérience de l’opérateur. L’automatisation de ces tâches permet aujourd’hui d’augmenter le rendement, d’éliminer le risque d’erreur humaine et d’améliorer la fiabilité et la répétabilité globales du processus.
Les stations robotisées pour la manipulation des liquides permettent d’automatiser un grand nombre de tâches répétitives comme le débouchage et le rebouchage des tubes à essai, la distribution précise de liquide, le mélange, l’agitation et le transport des tubes à essai traités. Jusqu’à récemment, ce travail était effectué manuellement par des techniciens formés à l’aide de pipettes électroniques. La vitesse, la précision et l’exactitude de ce processus dépendaient entièrement des compétences et de l’expérience de l’opérateur. L’automatisation de ces tâches permet aujourd’hui d’augmenter le rendement, d’éliminer le risque d’erreur humaine et d’améliorer la fiabilité et la répétabilité globales du processus.
L’utilisation manuelle des pipettes pour effectuer des analyses longues et complexes est difficile en raison des variations de la vitesse de distribution de liquides de viscosité différente et des contraintes de cisaillement. Par conséquent, le risque d’erreurs coûteuses (éclaboussures et contamination croisée) augmente. La manipulation manuelle est également intrinsèquement plus lente que les systèmes automatisés, ce qui réduit le rendement. En particulier pour les systèmes qui ont jusqu’à 64 tubes en parallèle.
Grâce à l’automatisation, un plus grand nombre d’échantillons peut être analysé plus rapidement. Enfin, la précision et l’exactitude sont renforcées, ce qui permet d’obtenir des résultats cohérents sur plusieurs itérations d’expériences. En éliminant les sources de variation des volumes de liquides, les résultats peuvent être reproduits, ce qui permet de tirer des conclusions précises.
 Il existe plusieurs types de machines de laboratoire robotisées pour la manipulation de liquides en fonction de la tâche à réaliser. Par exemple, lors de l’analyse d’un petit nombre d’éprouvettes, un seul bras robotisé avec plusieurs joints rotatifs et un préhenseur peut suffire. Cependant, pour des volumes plus élevés et un traitement en parallèle de plusieurs échantillons, un robot cartésien avec des systèmes de motorisation linéaire est optimal. Une conception type comporte des pipettes qui se déplacent à l’aide de trois axes linéaires au dessus de tubes à essai statiques. X, Y et Z.
Il existe plusieurs types de machines de laboratoire robotisées pour la manipulation de liquides en fonction de la tâche à réaliser. Par exemple, lors de l’analyse d’un petit nombre d’éprouvettes, un seul bras robotisé avec plusieurs joints rotatifs et un préhenseur peut suffire. Cependant, pour des volumes plus élevés et un traitement en parallèle de plusieurs échantillons, un robot cartésien avec des systèmes de motorisation linéaire est optimal. Une conception type comporte des pipettes qui se déplacent à l’aide de trois axes linéaires au dessus de tubes à essai statiques. X, Y et Z.
Parmi ceux-ci, l’axe Z est plus difficile à actionner et présente un dilemme intéressant concernant la sélection des moteurs miniatures. Cet axe permet de déplacer l’embout de la pipette dans le liquide pour l’aspiration, puis de le soulever une fois l’aspiration terminée. Il faut trouver un bon équilibre entre vitesse et précision afin d’obtenir un bon rendement.
La pipette est d’abord abaissée rapidement vers le récipient de liquide, ce qui nécessite un système d’actionnement avec un bon couple d’accélération et une bonne vitesse pour les mouvements rapides. Une fois qu’elle s’approche du niveau de remplissage de liquide, la tête doit ralentir. Lorsque la surface du liquide a été détectée par un capteur, la pipette est positionnée à un niveau défini en dessous de la surface pour permettre l’aspiration. Une fois l’aspiration terminée, la tête de la pipette se rétracte et est prête à distribuer le liquide.
En fin de compte, tout moteur sélectionné à cet effet doit prendre en charge un mouvement lent et précis lorsqu’un positionnement précis est requis, tout en offrant une accélération et une vitesse élevées lors de l’abaissement ou de la rétraction de la tête de la pipette.
En raison d’un espace limité et des mouvements hautement dynamiques des stations de travail robotisées de manipulation de liquides, les puissants moteurs CC sans balais (BLDC) constituent un choix idéal pour l’entraînement de l’axe Z du mouvement. Il existe deux designs prédominants. Les moteurs à rotor interne sans encoche, comme le moteur Portescap 16ECP24, ont un petit diamètre, mais sont plus longs, tandis que les moteurs à rotor externe à encoche, comme le moteur Portescap 20ECF14, sont plus plats, mais ont un plus grand diamètre. Associés à un codeur, les deux moteurs peuvent fournir des performances élevées et un positionnement précis.
Les différences entre les deux moteurs vont au-delà de leurs dimensions. La caractéristique moteur la plus importante d’un système d’entraînement dans une station de travail robotisée de manipulation de liquides est la capacité d’accélération. Elle dépend de facteurs tels que l’inertie du rotor du moteur, le couple moteur maximal disponible pour l’accélération et l’inertie de la charge entraînée par le moteur. La capacité d’accélération dépend donc principalement de l’inertie du rotor et du couple moteur disponible.
La conception du rotor interne du moteur 16ECP24 permet d’atteindre des vitesses allant jusqu’à 30 000 tr/min, ce qui est un avantage sur l’axe Z, mais les vis sans fin et les vis à billes utilisées dans ces machines limitent généralement la vitesse maximale à 10 000 tr/min. De plus, la distance linéaire parcourue entre les pipetages peut être courte, ce qui laisse peu de temps au moteur pour atteindre des vitesses élevées.
D’un autre coté, la masse mobile plus importante du 20ECF14 avec le rotor extérieur génère une inertie plus élevée que celle du 16ECP24. Ce phénomène est compensé par le rotor extérieur multipolaire et son diamètre plus grand, qui permet d’obtenir un facteur de régulation du moteur beaucoup plus faible (modification de la vitesse due à la modification du couple de charge). Par conséquent, le 20ECF14 est plus efficace et plus puissant avec un couple continu maximal de 9 mNm (par rapport à 4 mNm pour le 16ECP24), ce qui lui permet d’obtenir un couple de pointe plus élevé pour l’accélération. Un couple de pointe élevé génère de la chaleur, et la faible résistance thermique du moteur permet de dissiper cette chaleur plus efficacement lors d’accélérations brusques, un autre avantage de cette solution.
En fin de compte, les deux moteurs sont parfaitement adaptés à l’application de l’axe Z. Le 16ECP24 offre une inertie plus faible et des vitesses plus élevées, tandis que le 20ECF14 offre une capacité de couple et une dissipation calorifique supérieures. Les deux ont un encombrement compact pour s’adapter à une variété de conceptions de postes de travail robotisés de manipulation de liquides.
Différents moteurs offrent des avantages et des performances différents, de sorte que le choix d’une solution optimale repose sur la comparaison de plusieurs facteurs en fonction des caractéristiques souhaitées pour la machine. En travaillant avec un expert sur le terrain, tel que Portescap, les constructeurs de machines peuvent bénéficier de son expérience et obtenir un moteur hautement optimisé et économique. La sélection du moteur adapté à une station de travail robotisée pour la manipulation de liquides permet non seulement d’améliorer la fiabilité, les performances et le rendement, mais aussi de raccourcir le délai avant la prochaine découverte scientifique.


